-
[코드리뷰] Mip-NeRF Code BreakdownNeRF 2023. 7. 26. 17:58
* 해당 포스팅은 카카오에서 pytorch 코드로 구현한 Mip-NeRF 코드를 기반으로 합니다.
▶ Mip-NeRF 논문 리뷰: 2023.07.23 - [Papers] - [논문리뷰] Mip-NeRF: A Multiscale Representation for Anti-Aliasing Neural Radiance Fields
[논문리뷰] Mip-NeRF: A Multiscale Representation for Anti-Aliasing Neural Radiance Fields
ICCV 2021 [Paper][Code(Jax)] Authors (Google, UC Berkeley) Jonathan T. Barron Ben Mildenhall Matthew Tancik Peter Hedman Ricardo Martin-Brualla Pratul P. Srinivasan 0. Abstract 기존 모델의 문제점 Ray를 사용한다. NeRF는 aliased, blurred 된
libby-yu.tistory.com
▶ NeRF 코드 리뷰: 2023.07.03 - [NeRF] - [코드리뷰] NeRF Code Breakdown
[코드리뷰] NeRF Code Breakdown
작성중 Prepare Dataset if not os.path.exists('tiny_nerf_data.npz'): !wget http://cseweb.ucsd.edu/~viscomp/projects/LF/papers/ECCV20/nerf/tiny_nerf_data.np data = np.load('tiny_nerf_data.npz') images = data['images'] poses = data['poses'] focal = data['f
libby-yu.tistory.com
본 포스팅에서는 NeRF 코드와 상이한 부분만 리뷰하겠습니다.
- Cone tracing - Sampling
- Integrated positional encoding (IPE)
Cone Tracing
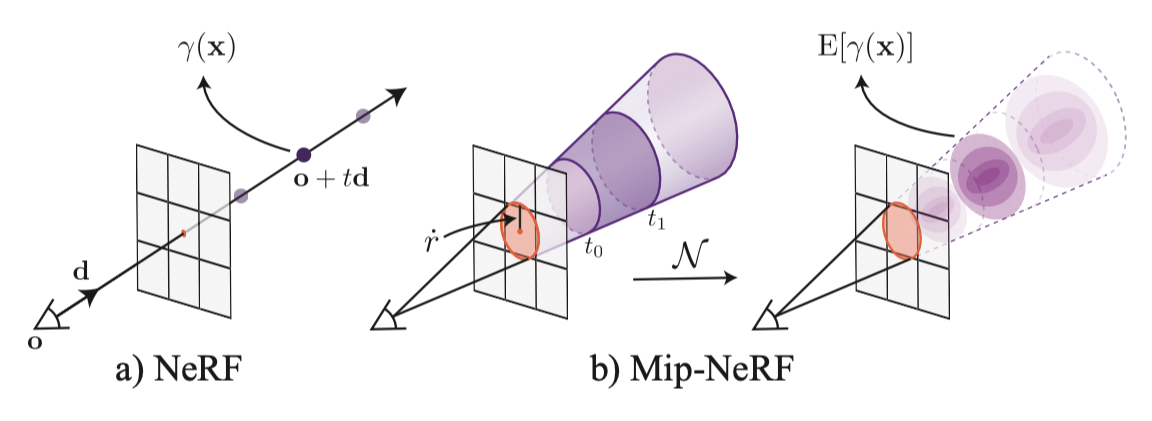
기존 NeRF에서 ray를 따라 sampling 했던 것과는 달리, Mip-NeRF는 cone(원뿔)을 캐스팅한 후 이를 일정 간격의 볼륨 (conical frustrum) 으로 sampling (cone tracing) 하고 있다.
1. Casting Cone
$\mu_{t}, \sigma^{2}_{t}, \sigma^{2}_{r}$ 값을 활용하여 Multivariate Gaussian을 구하는 과정이다. 여기서 Multivariate Gaussian은 conical frustrum 내부 볼륨의 특성을 의미한다.
def cast_rays(t_vals, origins, directions, radii, ray_shape): t0 = t_vals[..., :-1] t1 = t_vals[..., 1:] if ray_shape == "cone": gaussian_fn = conical_frustum_to_gaussian elif ray_shape == "cylinder": gaussian_fn = cylinder_to_gaussian else: assert False means, covs = gaussian_fn(directions, t0, t1, radii) means = means + origins[..., None, :] return means, covs1-1) Conical Frustrum
두개의 $t$ 값 사이의 conical frustrum에 위치한 $x$의 집합은 아래와 같다. $$F(x, o, d, \dot{r}, t_{0}, t_{1}) = \left\{ \left( t_{0} < \frac{d^{T} (x-o)}{\lVert d \rVert^{2}_{2}} < t_{1} \right) \wedge \left( \frac{d^{T} (x-o)}{\lVert d \rVert_{2} \lVert x-o \rVert_{2}} > \frac{1}{\sqrt{1 + {(\dot{r} / \lVert d \rVert_{2})}^{2}}} \right) \right\}$$ 만약 $x$가 $(x, o, d, \dot{r}, t_{0}, t_{1})$로 정의된 conical frustrum 안에 위치해 있다면, $F(x, \cdot ) = 1$이다. Conical frustrum 내부의 모든 좌표에 대해 PE를 계산하면, $$\gamma^* (o, t, \dot{r}, t_{0}, t_{1}) = \frac{\int \gamma (x) F(x, o, d, \dot{r}, t_{0}, t_{1})dx}{\int F(x, o, d, \dot{r}, t_{0}, t_{1}) dx}$$ Gaussian을 구하기 위해 $\mu_{t}, \sigma^{2}_{t}, \sigma^{2}_{r}$ 값을 구한다.
def conical_frustum_to_gaussian(d, t0, t1, radius): mu = (t0 + t1) / 2 # 중심점 delta = (t1 - t0) / 2 # 너비의 절반 t_mean = mu + (2 * mu * delta**2) / (3 * mu**2 + delta**2) # Ray의 평균 거리 t_var = (delta**2) / 3 - (4 / 15) * ( (delta**4 * (12 * mu**2 - delta**2)) / (3 * mu**2 + delta**2) ** 2 ) # Ray의 분산 r_var = radius**2 * ( (mu**2) / 4 + (5 / 12) * delta**2 - 4 / 15 * (delta**4) / (3 * mu**2 + delta**2) ) # Ray의 수직분산 return translate_gaussian(d, t_mean, t_var, r_var)- 중심점: $t_{\mu} = (t_{0} + t_{1}) / 2$
- 너비의 절반: $t_{\delta} = (t_{1} - t_{0}) / 2$ * Interval (Critical for numerical stability)
- Ray의 평균 거리: $\mu_{t} = \mu + \frac{2 * \mu * t_{\delta}^{2}}{3 * \mu^{2} + t_{\delta}^{2}}$
- Ray 분산: $\sigma^{2}_{t} = \frac{t_{\delta}^{2}}{3} - \frac{4}{15} * \frac{t_{\delta}^{4} * (12 * \mu^{2} - t_{\delta}^{2})}{{(3 * \mu^{2} + t_{\delta}^{2})}^{2}}$
- Ray의 수직 분산 (Variance perpendicular): $\sigma^{2}_{r} = \dot{r}^{2} * (\frac{\mu^{2}}{4} + \frac{5}{12} * t_{\delta}^{2} - \frac{4}{15} * \frac{t_{\delta}^{4}}{3 * \mu^{2} + t_{\delta}^{2}})$
1-2) Cylinder
def cylinder_to_gaussian(d, t0, t1, radius): t_mean = (t0 + t1) / 2 r_var = radius**2 / 4 t_var = (t1 - t0) ** 2 / 12 return translate_gaussian(d, t_mean, t_var, r_var)2) Translate to Gaussian
Conical frustrum 의 좌표계 상의 Gaussian 을 World 좌표계로 변환하는 과정 $$\mu = o + \mu_{t} d, \quad \sum=\sigma_{t}^{2}(dd^{T}) + \sigma_{r}^{2}\left( I - \frac{dd^{T}}{\lVert d \rVert_{2}^{2}} \right)$$
* 아래 코드는 카카오 구현에서 lift_gaussian(.) 함수로 정의되어 있지만, 논문의 gaussian lifting 의미와 상이하여 임의로 함수이름을 고쳤습니다.
def translate_gaussian(d, t_mean, t_var, r_var): mean = d[..., None, :] * t_mean[..., None] d_mag_sq = torch.sum(d**2, dim=-1, keepdim=True) thresholds = torch.ones_like(d_mag_sq) * 1e-10 d_mag_sq = torch.fmax(d_mag_sq, thresholds) # 나누어 주는 값이기 때문에 최솟값을 0이 아닌 1e-10으로 고정 d_outer_diag = d**2 null_outer_diag = 1 - d_outer_diag / d_mag_sq t_cov_diag = t_var[..., None] * d_outer_diag[..., None, :] xy_cov_diag = r_var[..., None] * null_outer_diag[..., None, :] cov_diag = t_cov_diag + xy_cov_diag return mean, cov_diag- $\mu = o + \mu_{t} d$
- d_mag_sq: $\lVert d \rVert^{2}_{2}$
- d_outer_diag: $dd^{T}$
- null_outer_diag: $I - \frac{dd^{T}}{\lVert d \rVert_{2}^{2}}$
- t_cov_diag: $\sigma^{2}_{t} (dd^{T})$
- xy_cov_diag: $\sigma^{2}_{r} \left( I - \frac{dd^{T}}{\lVert d \rVert_{2}^{2}} \right)$
- cov_diag: $\sum$
2. Sampling
def sample_along_rays( rays_o, rays_d, radii, num_samples, near, far, randomized, lindisp, ray_shape, ): bsz = rays_o.shape[0] t_vals = torch.linspace(0.0, 1.0, num_samples + 1, device=rays_o.device) if lindisp: t_vals = 1.0 / (1.0 / near * (1.0 - t_vals) + 1.0 / far * t_vals) else: t_vals = near * (1.0 - t_vals) + far * t_vals if randomized: mids = 0.5 * (t_vals[..., 1:] + t_vals[..., :-1]) upper = torch.cat([mids, t_vals[..., -1:]], -1) lower = torch.cat([t_vals[..., :1], mids], -1) t_rand = torch.rand((bsz, num_samples + 1), device=rays_o.device) t_vals = lower + (upper - lower) * t_rand else: t_vals = torch.broadcast_to(t_vals, (bsz, num_samples + 1)) means, covs = cast_rays(t_vals, rays_o, rays_d, radii, ray_shape) return t_vals, (means, covs)Integrated Positional Encoding
IPE 는 Cone tracing으로 샘플링된 Multivariate Gaussian을 통해 연산된다.
t_vals, samples = sample_along_rays( rays_o, rays_d, radius, num_samples, near, far, randomized, lindisp, ray_shape, ) samples_enc = integrated_pos_enc(samples, 2, 16)def integrated_pos_enc(samples, min_deg=0, max_deg=16): scales, shape = pe_fourier(samples, min_deg, max_deg) y, y_var = lift_gaussian(samples, scales, shape) samples_enc = expected_sin( torch.cat([y, y + 0.5 * np.pi], axis=-1), torch.cat([y_var] * 2, axis=-1))[0] return samples_enc1) Rewrite the PE as a Fourier feature
$$P=\begin{bmatrix} 1 & 0 & 0 & 2 & 0 & 0 & & 2^{L-1} & 0 & 0 \\ 0 & 1 & 0 & 0 & 2 & 0 & ... & 0 & 2^{L-1} & 0 \\ 0 & 0 & 1 & 0 & 0 & 2 & & 0 & 0 & 2^{L-1} \end{bmatrix}^{T} , \quad \gamma (x)=\begin{bmatrix} sin(Px) \\ cos(Px) \end{bmatrix}$$
def pe_fourier(samples, min_deg=0, max_deg=16): x, x_cov_diag = samples scales = torch.tensor([2**i for i in range(min_deg, max_deg)]).type_as(x) shape = list(x.shape[:-1]) + [-1] return scales, shape2) Lift the multivariate Gaussian
$$\mu_{\gamma} = P\mu ,\quad \sum_{\gamma} = P\sum P^{T}$$
def lift_gaussian(samples, scales, shape): x, x_cov_diag = samples y = torch.reshape(x[..., None, :] * scales[:, None], shape) y_var = torch.reshape(x_cov_diag[..., None, :] * scales[:, None] ** 2, shape) return y, y_var3) Expectations over lifted multivariate Gaussian
$$\mathsf{E}_{x \sim \mathcal{N}(\mu, \sigma^{2})}[sin(x)] = sin(\mu) exp \left( -(1/2)\sigma^{2} \right)$$ $$\mathsf{E}_{x \sim \mathcal{N}(\mu, \sigma^{2})}[cos(x)] = cos(\mu) exp \left( - (1/2) \sigma^{2} \right)$$
def expected_sin(x, x_var): y = torch.exp(-0.5 * x_var) * torch.sin(x) y_var = 0.5 * (1 - torch.exp(-2 * x_var) * torch.cos(2 * x)) - y**2 y_var = torch.fmax(torch.zeros_like(y_var), y_var) return y, y_var